 Inteligencia Artificial (IA)
Inteligencia Artificial (IA) Algoritmos Cognitivos para Robots: del razonamiento simbólico a los agentes LLM
Introducción
Cuando hablamos de robots, solemos pensar en control, trayectorias y sensores. Pero lo que está pasando...
Inteligencia Artificial (IA)  Control
Control  Control
Control 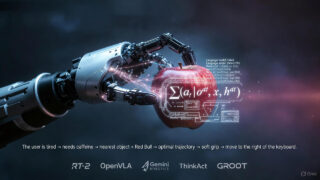 Robótica
Robótica  Robótica
Robótica  Robótica
Robótica  Control
Control  Control
Control  Inteligencia Artificial (IA)
Inteligencia Artificial (IA)  Inteligencia Artificial (IA)
Inteligencia Artificial (IA)